



Electronics Show 2011
Electronics Show 2011
Students in the Electronics class displayed their projects for the campus and community in a grand show in the Science Hall at the end of the 2011 Fall Semester.
The projects all used micro controllers–single chip computers that can be programmed to respond to sensor inputs and can control outputs.
Ghost Rider

Michael Miller
Aaron Shelley
Michael and Aaron took an electric scooter, added a force sensor (to detect tilt) and a circuit that turned the steering column in response to tilt. Their scooter balanced itself as it moved across the gym.



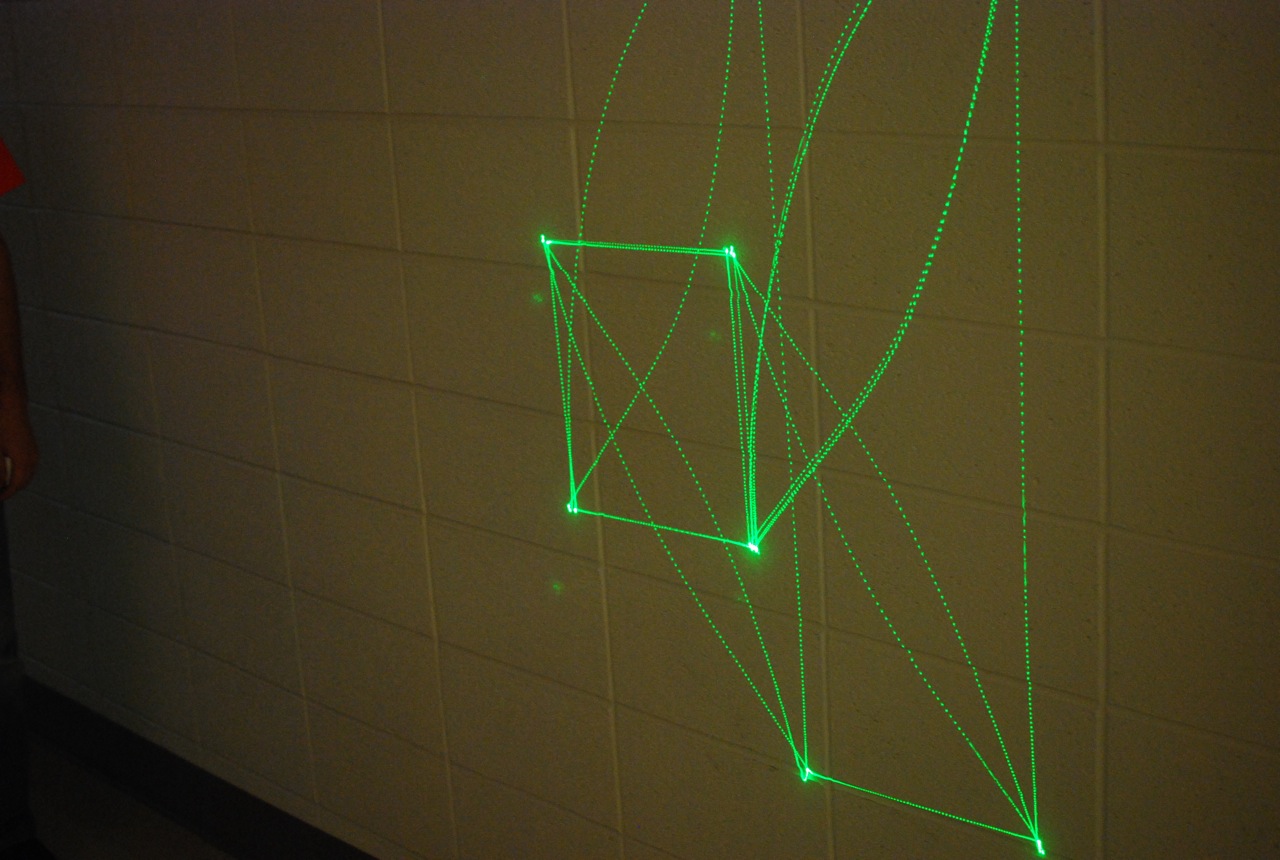
Laser Writer
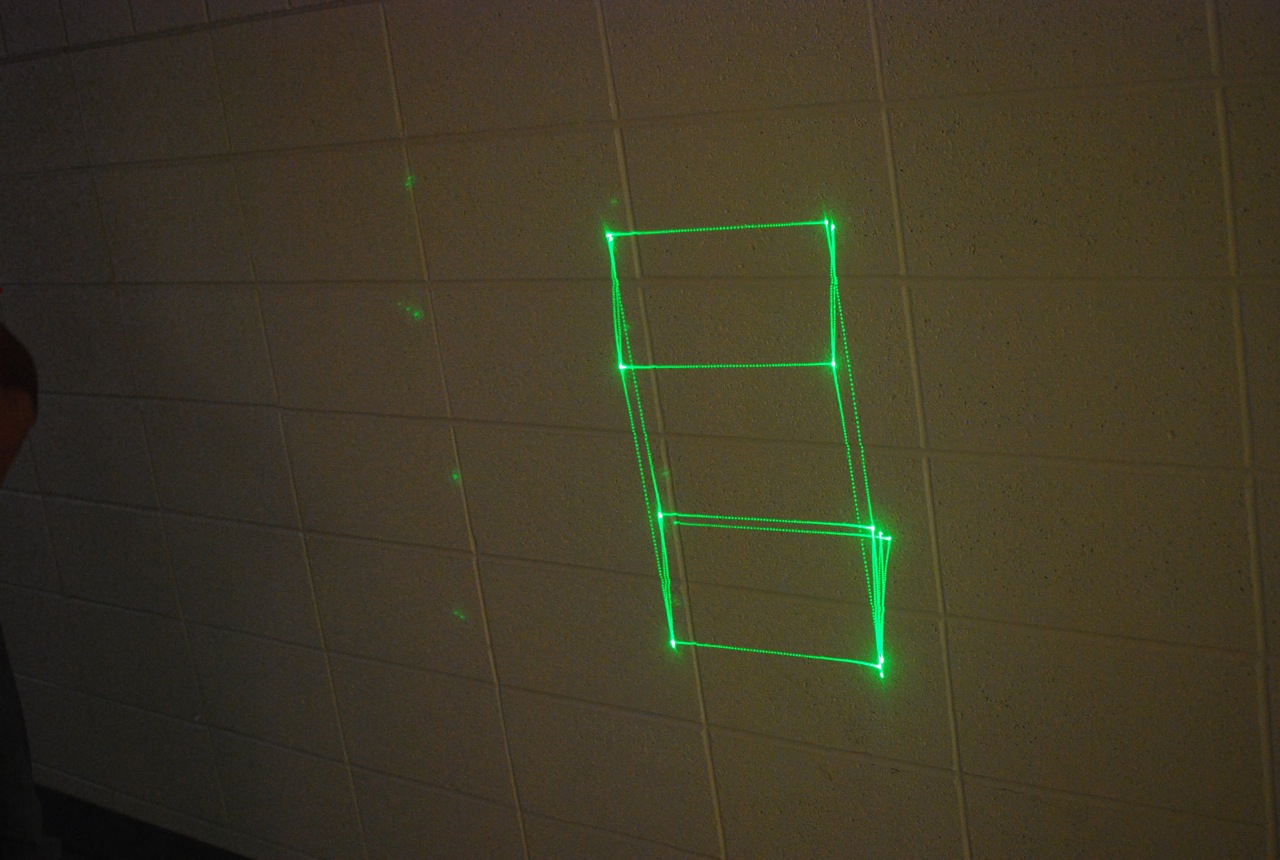
Michael Fecher
Joel Maust
A laser drew a pattern on the wall which could be manipulated by an operator. The positions of the operator’s hands in two lightboxes were sensed, and the pattern was edited and manipulated accordingly.

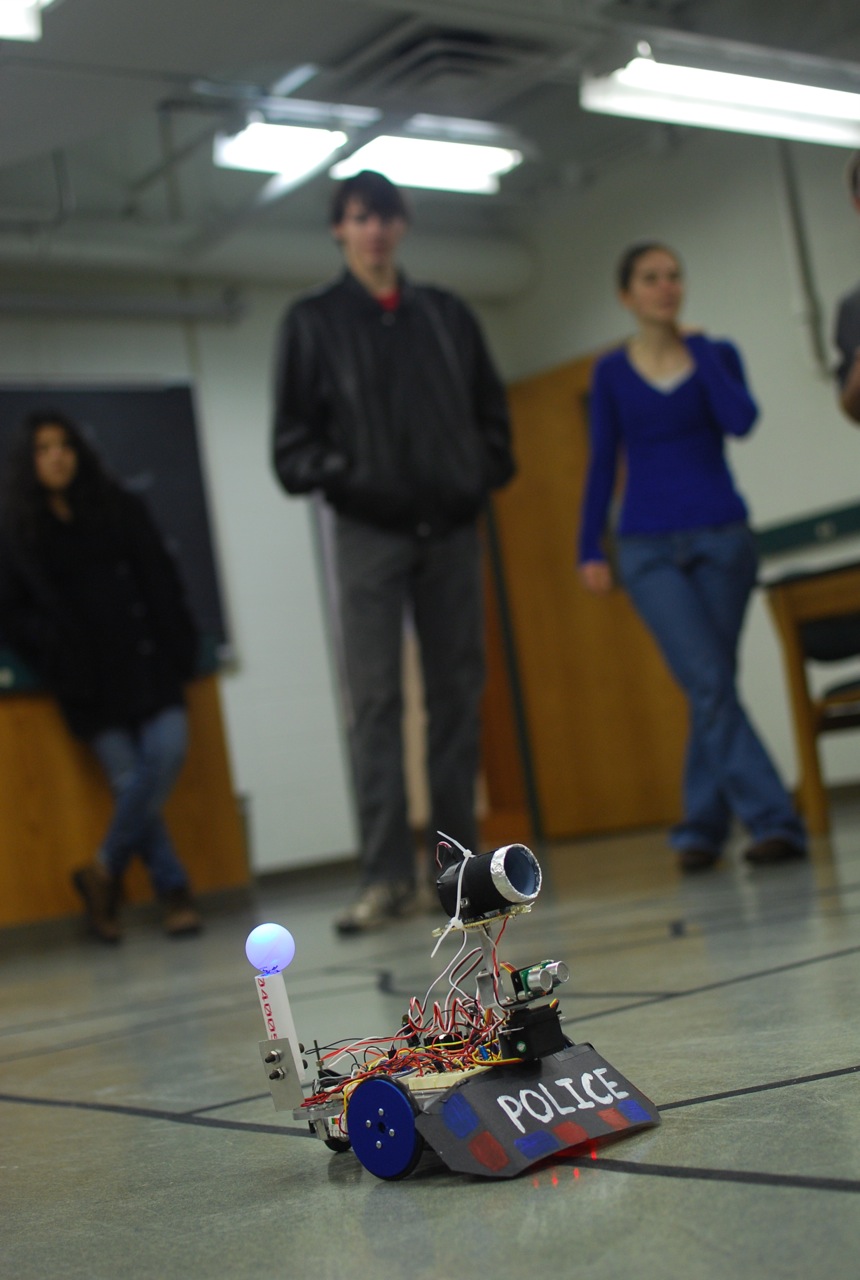
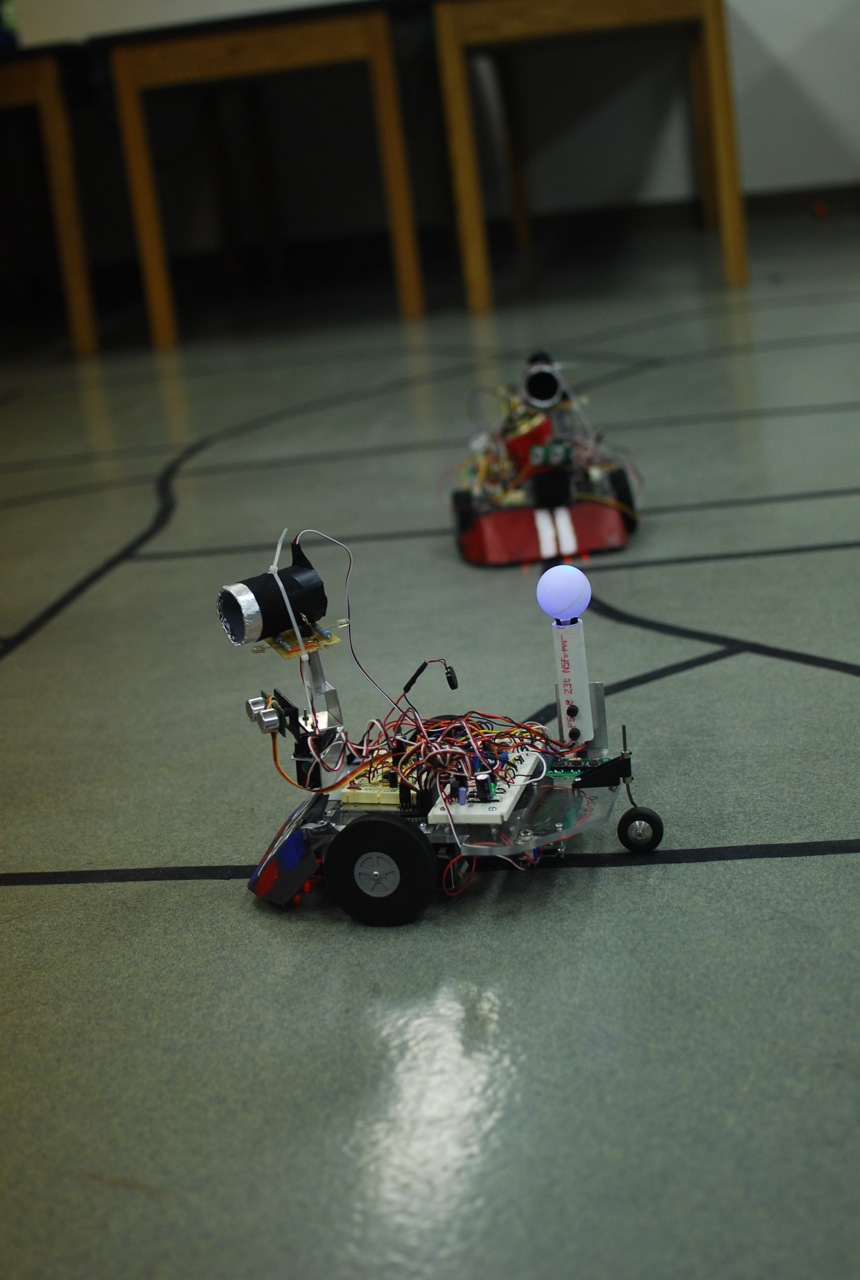
Cops and Robber
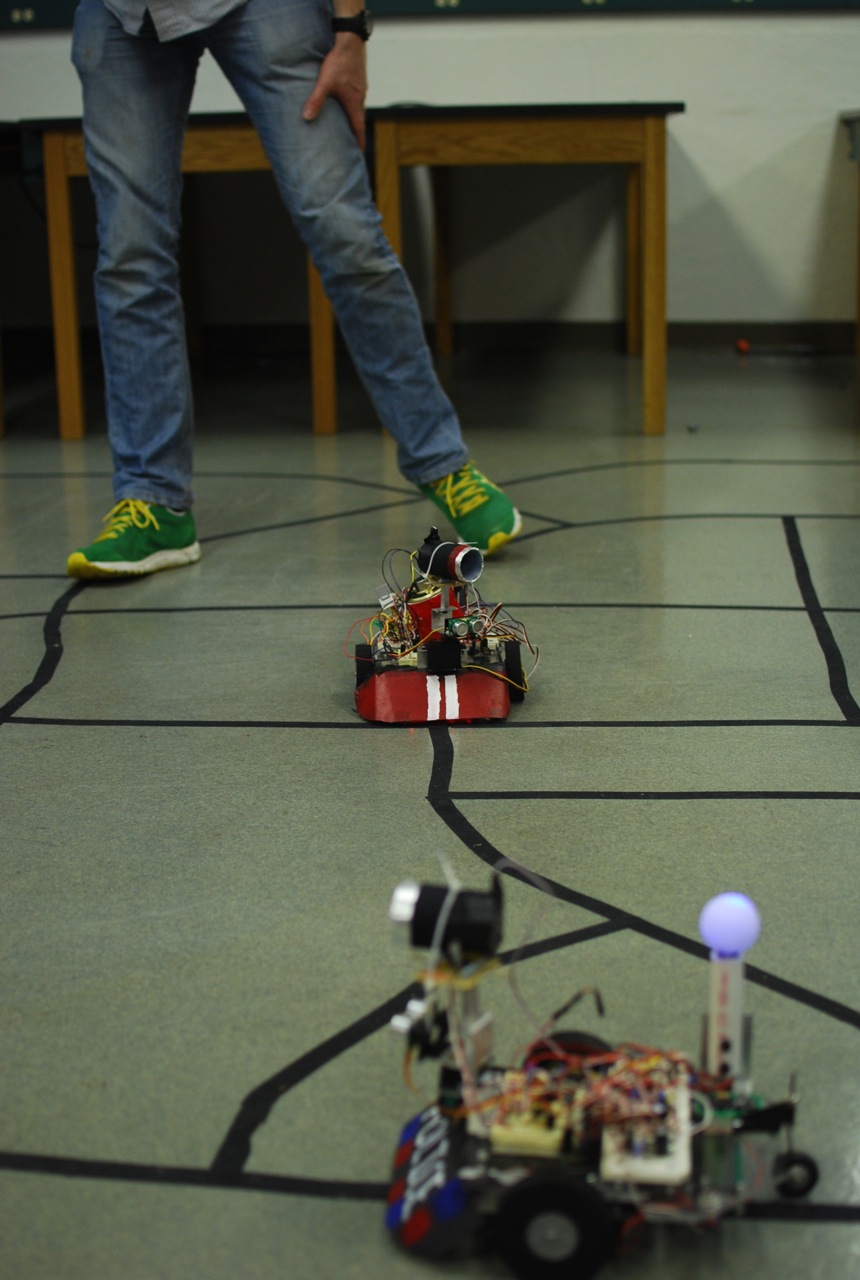
Sarah Rhody
Abe Pauls
Josh Schlabach
This project involved constructing 4 autonomous robots: 3 cops and 1 robber. All the robots were programmed to move only along the lines of a maze of black tape on the floor: each robot detected the reflection or lack of light reflection if the black tape was immediately below it, and steered accordingly. Each robot was fitted with an infrared LED and infrared detectors so that they could detect each other. The robber was programmed to move across the maze away from the cops, who were in turn trying to run down the robber.

Grass Buggy

Lucas Godschalk
The grass buggy used a GPS sensor to always go ‘home’, no matter where it was set down.
Nosing along

John Miller
Greg Thiessen
Andrew Glick
A video camera mounted on the steering handle of an electric cart detected the position of the driver’s red clown nose. Depending on the position, the cart turned left or right, sped up or slowed down: Hands-free operation!
Hall monitor

Michelle Espino
Dennis Chavez
Hall monitor was a robot with IR sensors programmed to run down a long hallway and avoid the walls.